
 EN
EN
 EN
EN ZH
ZH IT
IT ES
ES TH
TH TR
TR JA
JA PT
PT KO
KO RU
RU FR
FR DE
DE AR
AR
 Casa > Central de Produtos > Módulo Conjunto Planetário > Módulo de junta planetária leve e de baixa carga LZ5710
Casa > Central de Produtos > Módulo Conjunto Planetário > Módulo de junta planetária leve e de baixa carga LZ5710
Módulo de junta planetária leve e de baixa carga LZ5710
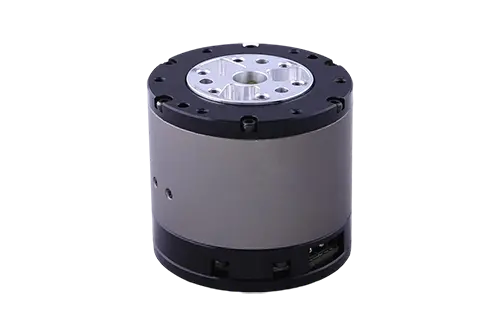
Peso: 1420g±20g
Número de pólos: 42 pólos
Número de fases: 3 fases
Método de acionamento: FOC (controle orientado a campo)
Taxa de redução: 10:1
Tecnologia FOC de hardware completo, desenvolvimento FPGA em nível de chip
Cabeamento Oco
Controle Triple-Loop com todas as frequências a 20KHz para resposta rápida
Barramento etherCat/canOpen
ADC de 16 bits com taxa de amostragem de 1 MHz
Freio de desligamento
A tecnologia central do produto reside no módulo de junta integrada harmônica, apresentando um design integrado de controle de acionamento. A estrutura interna do rotor permite cabeamento oco, enquanto opções diversificadas de modelos, incluindo as séries 11, 14, 17, 20, 25, 32 e 40, garantem aplicações flexíveis. Com perfil compacto e miniaturizado e baixo consumo de energia, adota mecanismo de freio tipo pino que aciona o travamento mecânico instantaneamente na perda de energia, com tempo de ação inferior a 10ms.
O design de roda dupla de aço, integrando rolamentos de rolos transversais com rodas de aço, reduz a ocupação do espaço axial. Ao unir duas rodas de aço com um flexspline, ele mitiga o estresse causado pela deformação do flexspline, alcançando operação suave, alta eficiência e precisão de posicionamento de até 20 segundos de arco.
Design ultracompacto e leve
Dimensões: Diâmetro Ø57mm × Altura 46mm, pesando apenas 300g – este é um módulo de junta compacto.
Estrutura não oca, com design mais simples e menor custo, indicada para juntas de extremidade que não necessitam de fiação.
Soluções maduras de drive e comunicação
Modo de acionamento: controle FOC orientado para o campo, com controle de loop triplo para torque, velocidade e posição – ideal para controle de junta de alta precisão.
Comunicação: interface CAN/CAN FD, compatível com controladores de robôs convencionais, fiação simples e forte capacidade anti-interferência.
Configuração de codificador magnético duplo: codificador magnético + codificador duplo, suportando controle de circuito fechado duplo no lado do motor e no lado da saída para aumentar a precisão do posicionamento.
Confiabilidade e Adaptabilidade Ambiental
Faixa de temperatura: -20~60°C, cobrindo condições operacionais típicas de ambientes internos a semi-externos.
Ruído: ≤55 dB(A); design de baixo ruído, ideal para cenários de colaboração homem-robô.
Classe de isolamento: Classe B, garantindo confiabilidade operacional a longo prazo.
Tipo de rolamento: Rolamento rígido de esferas, estrutura simples, baixo custo de manutenção.
Este LZ5710N é um módulo de junta plug-and-play leve, de baixo consumo de energia, projetado para aplicações de carga leve. Suas principais vantagens incluem: torque nominal de 3 Nm, folga baixa de apenas 7 minutos de arco, controle acionado por FOC, comunicação CAN e codificadores magnéticos duplos. É ideal como efetor final, articulação de pulso ou tornozelo para exoesqueletos ou robôs colaborativos e também é perfeito para o rápido desenvolvimento de pequenos robôs educacionais e de pesquisa.
| Modelo | LZ4610N Não oco | LZ4605N Não oco | LZ5710N Não oco | LZ5740N Não oco | LZ5736N Não oco | LZ807.75N Não oco | LZ8025CN Não oco | LZ10028CH Eixo oco | LZ12028CH Eixo oco |
|---|---|---|---|---|---|---|---|---|---|
| Tipo de redutor | Planetário | Planetário | Planetário | Planetário | Planetário | Planetário | Planetário | Planetário | Planetário |
| Método de direção e controle | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| Dimensões Diâmetro × Altura (mm) | Φ46×38 | Φ46×38 | Φ57×46 | Φ57×60 | Φ57×70 | Φ80×47 | Φ80×60,5 | Φ100×68 | Φ120×80 |
| Relação de engrenagem | 10 | 5 | 10 | 40 | 36 | 7,75 | 25 | 28 | 28 |
| Torque nominal (N・m) | 0,85Nm | 0,4Nm | 3,4Nm | 12Nm | 29Nm | 7,75Nm | 27Nm | 67,5Nm | 126Nm |
| torque máximo (N・m) | 2,55Nm | 1,2Nm | 10,2Nm | 36Nm | 80Nm | 23,2Nm | 81Nm | 200Nm | 378Nm |
| Codificador Magnético | Codificador duplo | Codificador duplo | Codificador duplo | Codificador duplo | Codificador duplo | Codificador duplo | Codificador duplo | Codificador duplo | Codificador duplo |
| potência nominal (W) | 83 | 30 | 94 | 94 | 300 | 400 | 380 | 733 | 1570 |
| Tensão nominal (V) | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V |
| Modo de comunicação | PODE/CANFD | PODE/CANFD | PODE/CANFD | PODE/CANFD | PODE/CANFD | PODE/CANFD | PODE/CANFD | CANFD/Éter CAT | CANFD/Éter CAT |
| Faixa de temperatura operacional (°C) | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~70°C | -20~70°C | -20~80°C | -20~80°C |
| Classe de isolamento | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B | Classe B |
| Velocidade sem carga (rpm) | 110 | 220 | 210 | 112 | 130 | 645 | 156 | 143 | 140 |
| Velocidade nominal (rpm) | 80 | 160 | 140 | 80 | 100 | 516 | 120 | 110 | 107 |
| Corrente nominal (Apk) | 1.3 | 4,5 | 3 | 6 | 8 | 10.4 | 10.7 | 22 | 41,6 |
| Corrente de pico (apk) | 3.8 | 13,5 | 9 | 9 | 16 | 20,8 | 30 | 66 | 83,2 |
| Folga (arcmin) | ≤7arcmmin | ≤7arcmmin | ≤7arcmmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin |
| Constante Back-EMF | 1,54V/krpm | 1,54V/krpm | 7,1V/krpm | 7,1V/krpm | 7,52V/krpm | 0,1528 Vs/Rad | 7,45Vrms/krpm | 9Vrms/krpm | 8V/krpm |
| Constante de Torque | 0,025Nm/A | 0,025Nm/A | 0,1Nm/A | 0,1Nm/A | 0,124 Nm/A | 0,09143Nm/A | 0,15Nm/A | 0,15Nm/A | 0,12Nm/A |
| Contagem de etapas | 10 | 10 | 28 | 28 | 28 | 28 | 28 | 42 | 42 |
| Conexão da bobina | Conexão estrela | Conexão estrela | Conexão estrela | Conexão estrela | Conexão estrela | Conexão estrela | Conexão estrela | Conexão Delta | Conexão Delta |
| Tipo de rolamento | Rolamento de esferas | Rolamento de esferas | Rolamento de esferas | Rolamento de esferas | Rolamento de esferas | Rolamentos de rolos transversais | Rolamentos de rolos transversais | Rolamentos de rolos transversais | Rolamentos de rolos transversais |
| Ruído de trabalho (dB) | ≤55 | ≤55 | ≤55 | ≤58 | ≤60 | ≤65 | ≤65 | ≤65 | ≤70 |
| Peso (g) | 150 | 150 | 300 | 360 | 450 | 430 | 850 | 1550 | 2270 |
| Número de fases | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |

